|
Follow-Me HexCrawler
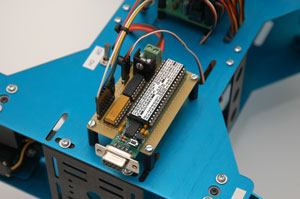
 Having mostly outgrown the Basic Stamp for my robot applications, I decided to upgrade my “Follow Me” HexCrawler to the new Propeller Chip. To keep construction simple I used theParallax PropSTICK. In addition to the Propeller chip the PropSTICK provides all the necessary support chips (like memory, 3.3 volt regulator, RS232, etc.) needed for a Propeller. All I needed to add a 10K resistor network used to interface to other 5 volt powered chips and a few connectors. Having mostly outgrown the Basic Stamp for my robot applications, I decided to upgrade my “Follow Me” HexCrawler to the new Propeller Chip. To keep construction simple I used theParallax PropSTICK. In addition to the Propeller chip the PropSTICK provides all the necessary support chips (like memory, 3.3 volt regulator, RS232, etc.) needed for a Propeller. All I needed to add a 10K resistor network used to interface to other 5 volt powered chips and a few connectors.
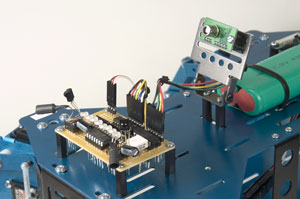 Like in the previous version of this robot I reused my Robot Sensor Array (RSA). It has 2 PIC microcontrollers. One processes the left/right IR proximity sensors while the other handles the Ping and the Thermal Array Sensor from Devantech. This array has 8 thermal sensors configured in a single row with an addition sensor for ambient temperature. The PIC reads these temperature values and performs the necessary signal processing. It can easily detect a person’s body heat. Its field of view is about 45 degrees. Also mounted on the RSA are 8 LEDs that indicate where the thermal sensor is registering heat. The Propeller communicates with the RSA using a simple 4 wire interface. Like in the previous version of this robot I reused my Robot Sensor Array (RSA). It has 2 PIC microcontrollers. One processes the left/right IR proximity sensors while the other handles the Ping and the Thermal Array Sensor from Devantech. This array has 8 thermal sensors configured in a single row with an addition sensor for ambient temperature. The PIC reads these temperature values and performs the necessary signal processing. It can easily detect a person’s body heat. Its field of view is about 45 degrees. Also mounted on the RSA are 8 LEDs that indicate where the thermal sensor is registering heat. The Propeller communicates with the RSA using a simple 4 wire interface.
 I ported the Basic Stamp code that I used in the original version to the Propeller Spin language. This proved to be a pretty simple port despite some of the idiosyncrasies of the Spin language. It’s no surprise that the new Spin code is smaller and has proven to be more robust than the original PBASIC code. I ported the Basic Stamp code that I used in the original version to the Propeller Spin language. This proved to be a pretty simple port despite some of the idiosyncrasies of the Spin language. It’s no surprise that the new Spin code is smaller and has proven to be more robust than the original PBASIC code.
I ported the C code that now currently runs in the GaitPIC to Spin and I have it run in its own Propeller Cog. This eliminates the need for a separate microcontroller chip and simplifies the overall design.
The block diagram, schematics and source code available to the right in the Resources section.
|
 Robots with a Mission
Robots with a Mission

